







Учебно-лабораторный комплект для разработки манипуляционных РТК с «Delta»-кинематикой
При покупке согласуйте с менеджером комплектацию, цену и важные для Вас характеристики оборудования.
Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
Применение РТК в образовательном процессе позволяет познакомить учащихся с принципами проектирования и конструирования манипуляционных роботов, алгоритмами управления манипуляционными роботами, основами разработки управляющего ПО, а также базовыми принципами построения архитектур систем управления гибких производственных ячеек.
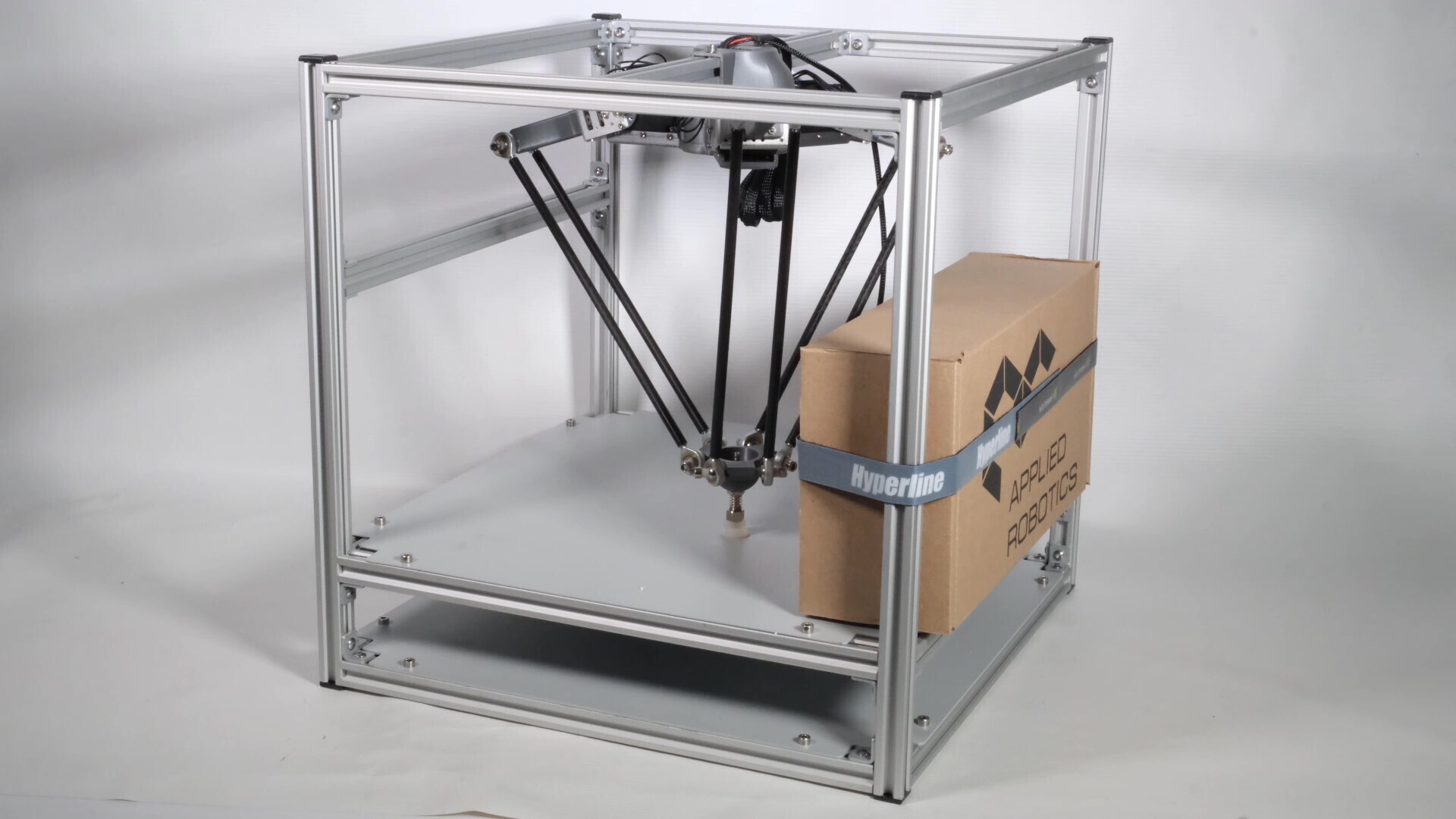
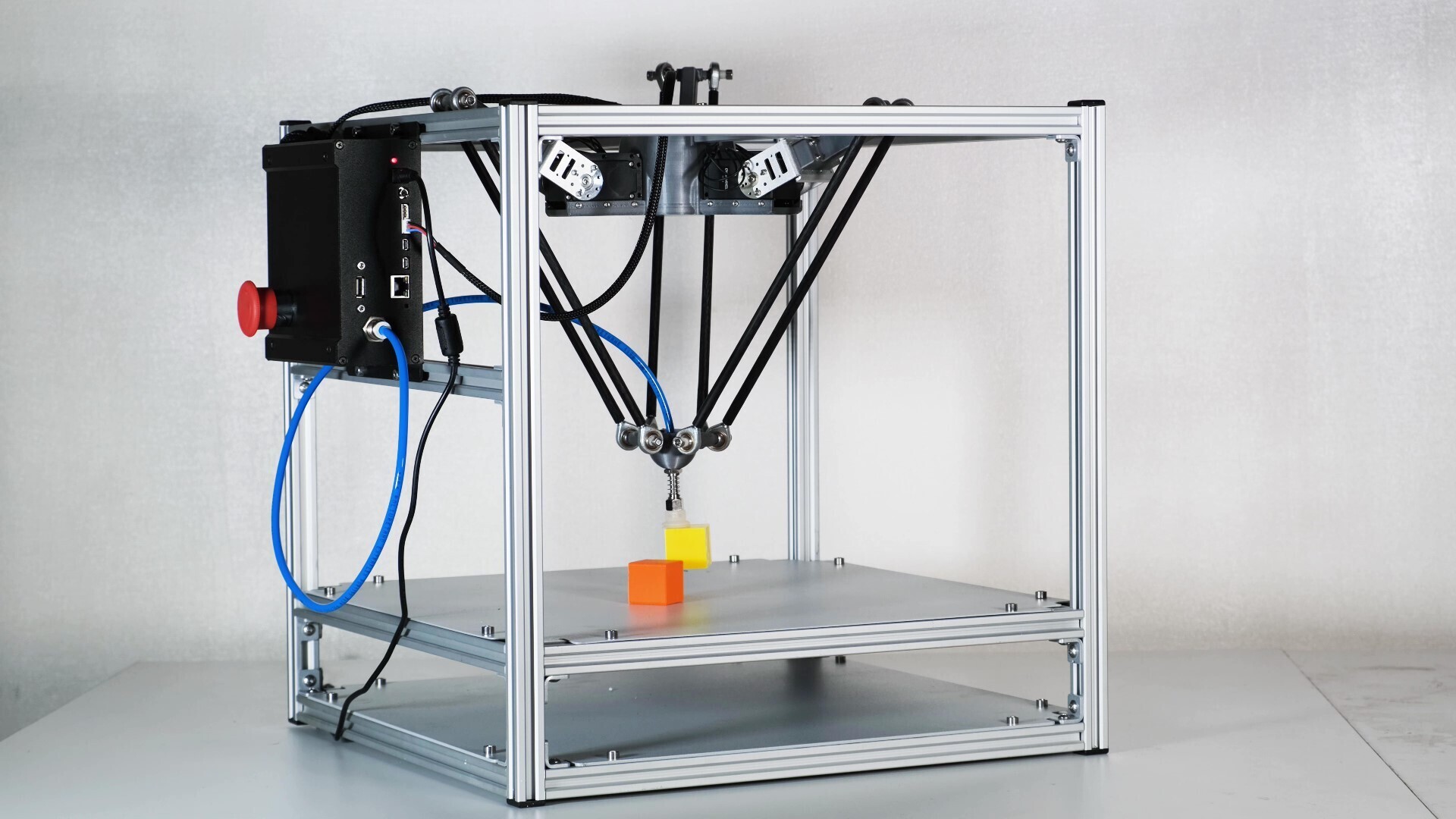
Учебно-лабораторный РТК реализован на основе комплектующих, применяемых в профессиональных сферах робототехники и представляет собой блочно-модульный конструктор для разработки макетов гибких производственных линий. Благодаря этому учащиеся могут на практике изучать основные принципы проектирования промышленных робототехнических комплексов и их систем управления, а также разрабатывать собственные проекты различных робототехнических систем промышленного назначения. Учебно-лабораторный манипуляционный РТК управляется с помощью клиент-серверного ПО, устанавливаемого на персональный компьютер учащегося. Учебно-лабораторный комплект предназначен для разработки гибких модульных автоматизированных линий на основе манипуляционных РТК, устанавливаемых над конвейерными линиями. Манипуляционные РТК с “Delta” - кинематикой, как правило, применяются в задачах упаковки и сортировки продукции, перемещаемой с помощью конвейерных линий. Технические особенности:
На изображении представлен пример производственной ячейки, выполненной из нескольких автоматизированных линий и манипулятора с "Delta"-кинематикой.
Программирование учебно-лабораторных РТК может осуществляться в блочно-модульной среде программирования для начинающих разработчиков, в эмуляторе промышленной среды программирования для специалистов в области промышленной автоматизации, среде LabView, а также в среде ROS и редакторе скриптов языка Python для разработчиков алгоритмов управления.
Управление манипуляционным РТК может осуществляться с помощью программируемого контроллера, а также посредством облачных сервисов ThingWorx. Таким образом, данный комплект является совместимым с моделями учебных манипуляторов, используемых в рамках компетенции «Интернет вещей» WS при разработке макетов «умных» автоматизированных фабрик.
Производитель
Прикладная робототехника
Страна производства
Россия
Гарантия
6 месяцев
Материал
Пластик,Металл,Электронные детали
Вид оборудования/Тип товара
Робот-манипулятор
Язык программирования
Python

